DIY Instruments
These ROV instruments were designed by BYU engineering students. Please browse to find one you would like to pursue, or send us your own designs and we can post them here for your fellow ROV builders.
Control:
Touchless 3D Interface Controller

This research demonstrates a new method for operators to control the SeaPerch remotely operated vehicle (ROV). Engineers and researchers are constantly seeking ways to improve the manner in which humans interface with robots. This is particularly important when robots become more complicated to operate and the user's attention becomes spread over several simultaneous tasks.
Download Additional Information
Buoyancy Engine

The buoyancy engine is a common feature among underwater gliders used for oceanic research. This project outlines the design, calibration, and use of a buoyancy engine that can be used with the Seaperch made from easily accessible, inexpensive materials. The buoyancy engine is designed to utilize two working fluids, air and cooking oil.
iPad Interface for ROVs

The current SeaPerch design is difficult to transport to remote locations, and makes no accommodation for a camera. An improved system was designed, centering on an Apple iPad interface, to emphasize portability while adding a camera and improving performance.
Three-Fin Propeller prototype 1
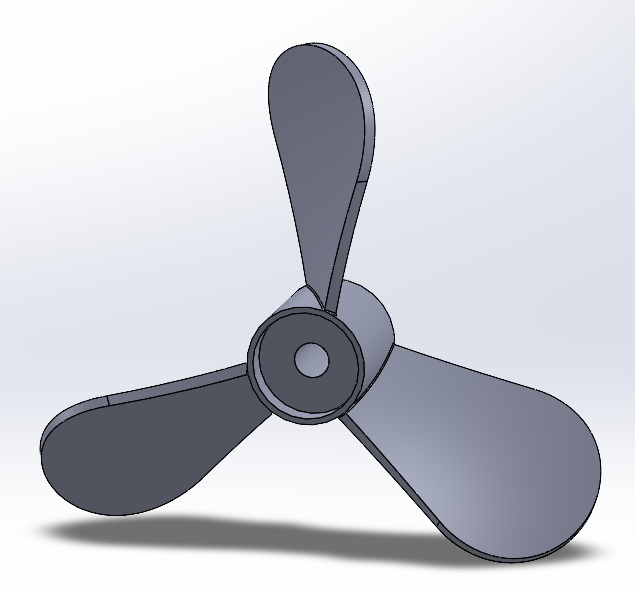
This CAD file by David Thomas and Casey Gooch may fit better on the shaft of the motors. To get this part, you will have to learn the basics of 3D printing. Download the file below and send it to a 3D printer to make! It can also be a good template to customize your propellers.
Emergency Blow for ROVs

The governing component in a submarine's ability to surface and submerge is the ballast tank. A ballast tank is a device that is based on principles of buoyancy -- water displaced by air in the tank allows the buoyant force to carry the vessel upward, while water intake by the tanks causes an increase in the overall density of the vessel and thus, a downward acceleration.
Propeller prototype 2
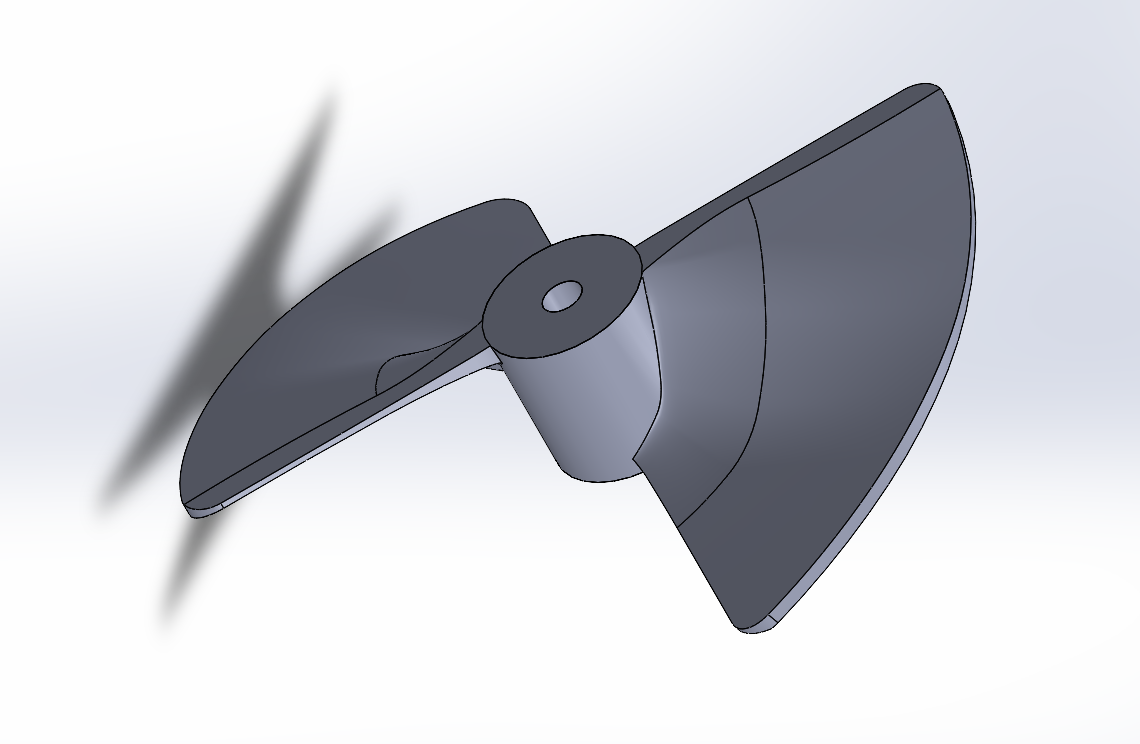
This is a propellor of a similar design to the white propellors that come in the kits, but it has been made with a hole that is a closer fit to the motor shaft.
Communication:
Wireless emf Transfer

Wireless power transfer is rapidly becoming more integrated with consumer electronics. This study is focused on understanding the relationship between induced emf and distance of resonate inductance in 8" by4" oval copper hoops. It is suggested that application of this research included the potential supply of wireless power through water-tight sealed electronics.
Underwater Communication

One major obstacle faced by underwater divers is how to communicate effectively, yet inexpensively, with individuals on the surface. Imagine yourself diving 50 feet under the water's surface when something goes wrong. Perhaps your oxygen is getting low or maybe your gear is lodged in a rock crevice.
Underwater Laser Communication

Underwater communication has presented unique problems because normal forms of communication do not function in the same manner underwater that they do above water. Lasers are a viable option as a solution to this problem despite the fact that lasers attenuate quickly in water.
Navigation Sensors:
Measuring Orientation - Compass

In order for any pilot to effectively navigate his or her vehicle or ROV he must know the orientation of the vehicle he is trying to navigate. Research and development was done to create a digital compass that could be used on board the SeaPerch ROV.
Depth Sustainment System
The SeaPerch project is an exciting introduction into engineering and the sciences for junior high students in which they build, modify, and compete with underwater ROVs. While competing, the pilot will find it difficult to determine the depth of the ROV due to the refraction of light on the surface of the water.
ROV Depth Gauge

Remotely operated vehicles (ROVs) equipped with submersible instruments, such as depth gauges, allow marine biology researchers to collect important data needed for their projects. Accurate depth gauges are costly and deter potential projects that are limited by inadequate funding. An alternative solution to measuring ROV underwater depth was designed by modifying a standard pressure transducer to serve as a depth gauge.